 RDS5160舵机.doc
RDS5160舵机.doc舵机+电磁锁
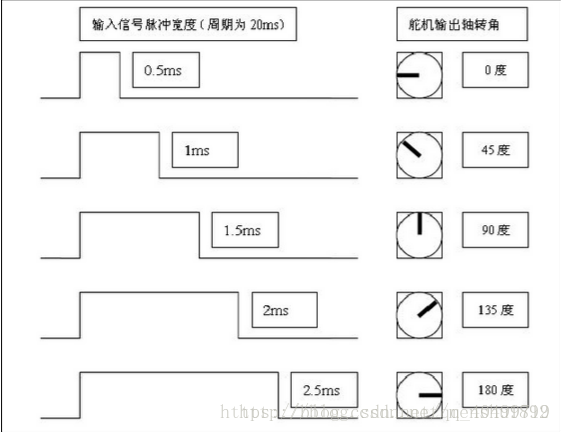
一般来说,舵机接收的PWM信号频率为50HZ,即周期为20ms。当高电平的脉宽在0.5ms-2.5ms之间时舵机就可以对应旋转到不同的角度.
舵机 位置反馈机制.
要获得当前的角度,发送一个50us(微秒)脉冲到伺服电机。在代表当前位置的微秒之后,伺服将拉高控制线。
在 arduino 里边的实现如下:
//当做普通IO脚, 输出 50us高电平后再拉低.
pinMode(pin, OUTPUT);
digitalWrite(pin, HIGH);
delayMicroseconds(50); // send a 50 us pulse to get the current position
digitalWrite(pin, LOW);
//置成输入, 读取ADC值转换为角度信息.
pinMode(pin, INPUT);
int position = pulseIn(pin, HIGH); //e.g. 500-2500
/////////////////////////////////////////////////////////////////////////////////////////
电磁锁一般通过普通IO脚进行输出, 高电平开锁.
可以进行一下参考.